
The Physics of the Roller Racer and the Plasma Car
The Roller racer and the Plasma cars are kid's ride-on toys that are powered by wiggling the handlebars. Somehow, they achieve forward thrust by levering the front wheels back and forth. How do they do that?
The Roller Racer is a product of the Mason Corporation, and the Plasma Car is made by PlaSmart Corporation (and hence the name "Plasma Car").
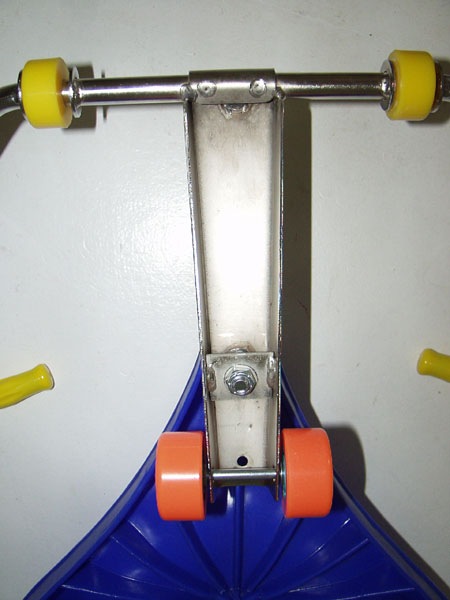
The front wheels of the machine are connected to the handlebars by a lever, in such a way that they are located behind the axis of rotation of the steering column [see picture]. This means that a torque applied to the handlebars will cause a lateral friction force by the wheels on the ground, a force parallel to the axle and perpendicular to the direction the wheels are rolling. If a component of this force points to the back of the car, the reaction force of the ground on the car (by Newtons's "action/reaction" law) points partly forward and accelerates the car. This is the force that drives the car forward and it ultimately comes from the force you exert on the handlebars (magnified by the lever advantage, which is 2 or 3 for the Roller Racer).
There is a bit of a trick to it. Having the wheel behind the axis of rotation of the steering column gives you a castering effect, so that if you push the machine forward without additional torque on the handlebars, the lateral forces will tend to bring the wheels back to the centre. The torque you have to apply to drive it is in the same direction, and in addition to, the castering torque. You quickly learn to torque the handlebars back toward the centre while the wheels are turned aside and not while you are rolling forward. Kids pick it up instinctively.
In-line skaters make a similar force by repeatedly pulling both skates laterally inward in a criss cross fashion in order to accelerate themselves. Skateboarders do a similar thing by pulling laterally inward while executing a series of alternating, tight turns.
Interesting questions are how to make and control a robot propulsion system using this scheme, and what, if anything, it has to do with the locomotion of snakes.
The Experimental Nonlinear Physics Group, Dept. of Physics, University of Toronto,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}