

|
 Alan Stummer
Alan Stummer
Research Lab Technologist |
|

|
Loch Box 1 |

|

Downloads
|
I am curious who uses what. Are these webpages a waste of time, or are they any help to others? Are the circuits, software and utilities appearing in other labs? Please send your comments or suggestions or what you have used (or not) or schematics of your version or pictures or anything! Email me, or be creative and send a postcard! I want to hear from the vacuum! |
Links
|
|
NOTICE: This webpage and associated files are provided for reference only. This is not a kit site! It is a collection of my work here at the University of Toronto in the Physics department. If you are considering using any schematics, designs, or anything else from here then be warned that you had better know something of what you are about to do. No design is guaranteed in any way, including workable schematic, board layout, HDL code, embedded software, user software, component selection, documentation, webpages, or anything. All that said, if it says here it works then for me it worked. To make the project work may have involved undocumented additions, changes, deletions, tweaks, tunings, alterations, modifications, adjustments, waving of a wand while wearing a pointy black hat, appeals to electron deities and just plain doing whatever it takes to make the project work. |
||

Started for Josiah Sinclair, Alex Bruening and Kent Fischer (postdoc) in Aephraim Steinberg's lab. Similar to Schlosser, this is an analog PID based laser wavelength controller. Although hopefully more versatile for unknown future uses, it is based on using the Qubig ADU (Advanced [laser] Driver Unit) which drives a 50MHz EOM, and a Thorlabs APD110A APD run in linear mode. The unit takes its feedback from the bipolar demodulated baseline output from the ADU (called the IF output [sic]) which is the result of two lasers shone through a gas absorption cell. The unit's PID (Proportional, Integral and Derivative control for closed loops) keeps one of the lasers at the proper wavelength with two outputs. A slow output (DC-50Hz) controls gross wavelength while a faster output (DC-50KHz, adjustable) provides corrections in the audio range and minimal line narrowing. An offset control allows locking at various parts of any feature of the absorption spectrum, although nominally will be around zero. A scan mode with adjustable scan width allows sweeping either or both outputs to identify and zoom in any absorption feature.
The term "Error" means the unit's input, the differentiated absorption level, either the ADU (described above) or an amplified PD such as Thorlabs amplified detectors.
1The name Loch Box is a nod to the M Squared Laser's Glaswegian origins.
Left to Right:
- Scan pot: When Fast or Slow are scanning, adjust the width of the scan.
- P pot: Adjust Proportional gain, affects both Fast and Slow outputs.
- I pot: Adjust Integral gain, affects both Fast and Slow outputs.
- D pot: Adjust Derivative gain, affects both Fast and Slow outputs.
- Fast pot: Adjust Fast channel master gain.
- Slow pot: Adjust Slow channel master gain.
- Scan switch: Select either internal (fixed at about 18Hz triangle, scans up then down) or external.
- Slope switch: Select either up or down slope of feature to lock to.
- Meter switch: Select for the meter to monitor Fast or Slow output, scale is ±10V.
- Fast switch: Select Fast output to Run, Off or Scan.
- Slow switch: Select Slow output to Run, Off or Scan.
- Offset pot: Adjust the offset of the feature to lock to, for a non-zero lock point.
- Bandwidth switch: For the Fast output, select the locking bandwidth. Use only as much BW as needed to provide a solid lock. Excess BW may cause oscillation.
- Error In BNC: Usually from a PD monitoring the loop to control. Voltage input, absolute max ±200mV before possible saturation, ±5V before damage.
- Scan In BNC: The external scan signal from a signal generator if external scan is selected, absolute max ±10V.
- Scope Y BNC: Output to a Y-axis on a scope, always monitors the Error input after BW and offset controls.
- Scope X BNC: Output to a X-axis on a scope, always monitors the scan signal.
- Fast Out BNC: Output for the Fast laser control channel.
- Slow Out BNC: Output for the Slow laser control channel.
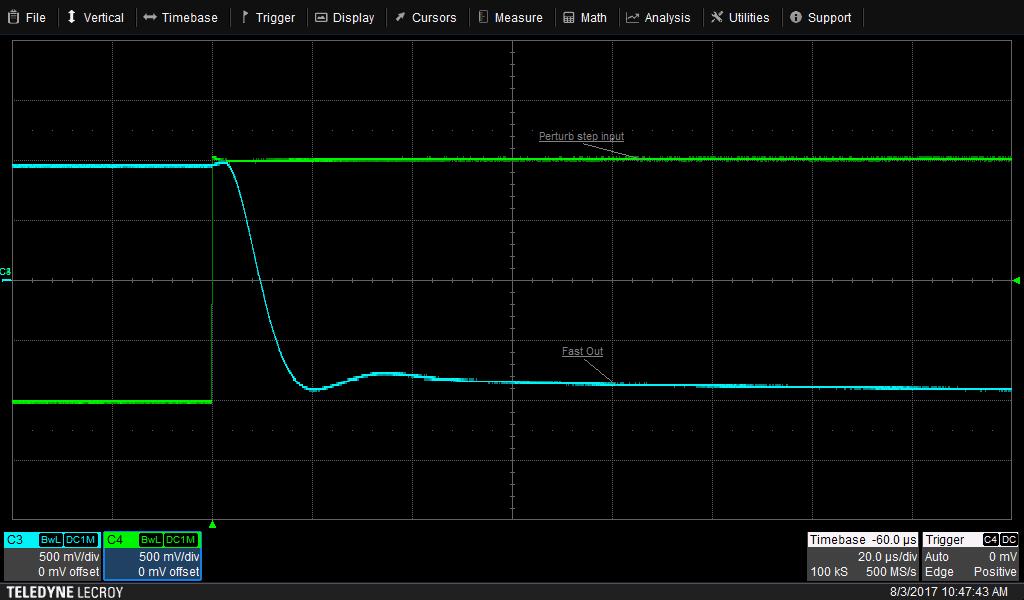
There are many schools of thought about how to adjust a PID loop. Here is my favourite. In general, first adjust with P-gain only until the loop oscillates then back off P-gain by 10-25%, depending on necessary allowable error. Next, adjust D-gain to reduce overshoot on large steps, if necessary. Finally, adjust I-gain to minimize errors over time. The following are taken from the first unit using a 100Hz square wave to introduce errors into the loop. Ideally, the Fast output will exactly counteract the square wave, however the real world kicks in with all of its delays and errors.
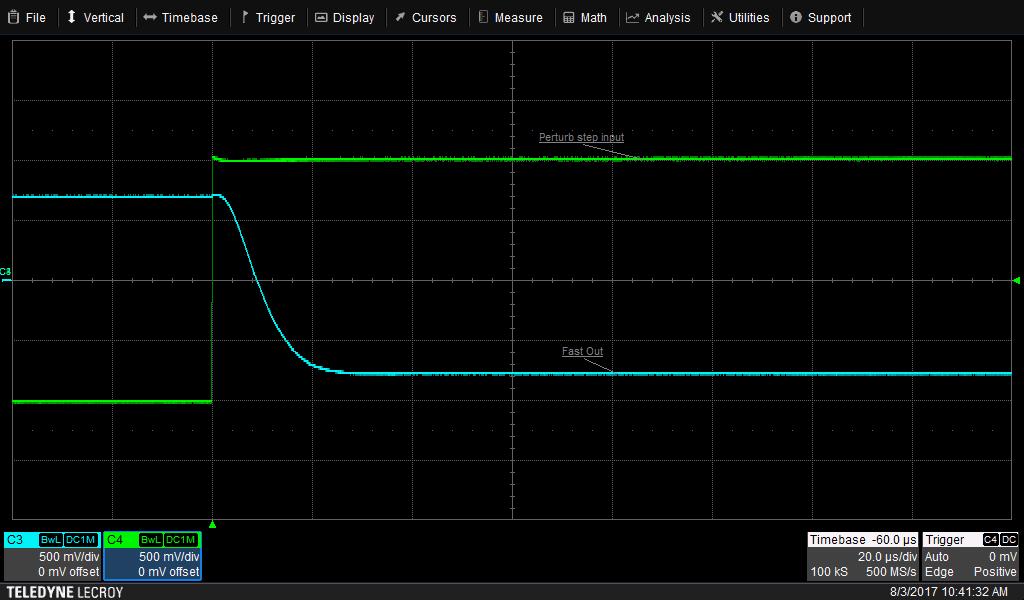 1. Basic closed loop using P-gain only. Note how the Fast output cannot fully correct for the square wave pertubation.
1. Basic closed loop using P-gain only. Note how the Fast output cannot fully correct for the square wave pertubation.
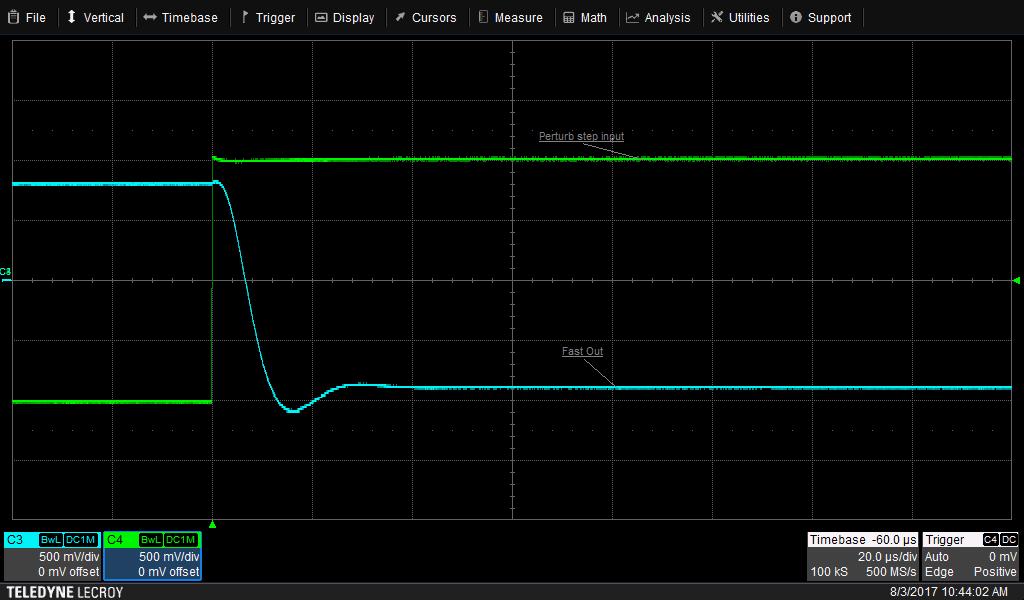 2. Increasing P-gain causes some overshoot. Some loops can accept overshoot, some can't.
2. Increasing P-gain causes some overshoot. Some loops can accept overshoot, some can't.
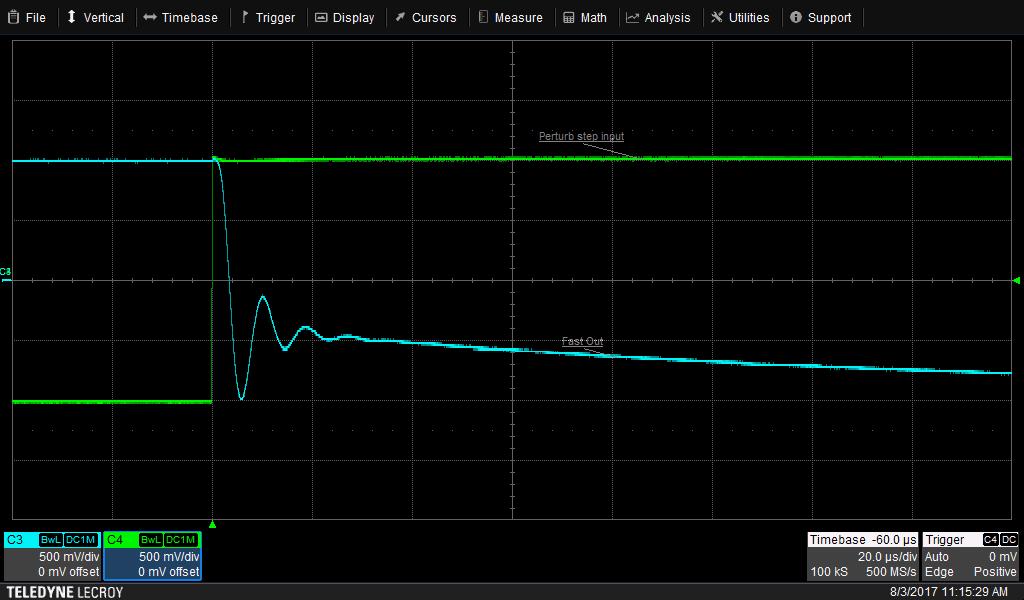
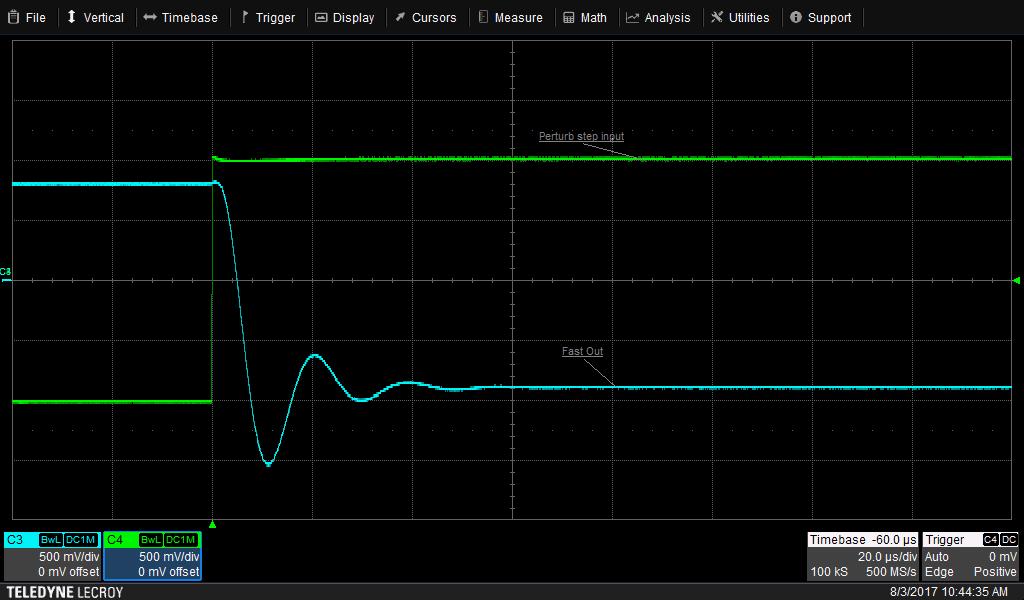 3. Increasing bandwidth may increase damped oscillations.
3. Increasing bandwidth may increase damped oscillations.
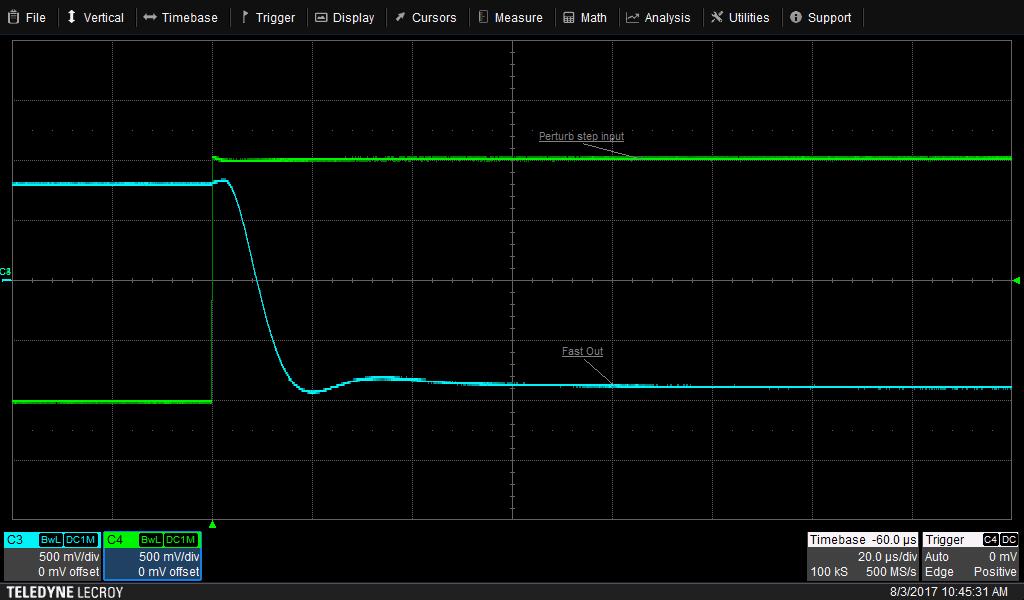 4. Adding D-gain helps damp oscillations.
4. Adding D-gain helps damp oscillations.
 5. Add I-gain to reduce long term errors.
5. Add I-gain to reduce long term errors.
 6. Tuned for no overshoot at the cost of slow settling, do this if overshoot is forbidden.
6. Tuned for no overshoot at the cost of slow settling, do this if overshoot is forbidden.
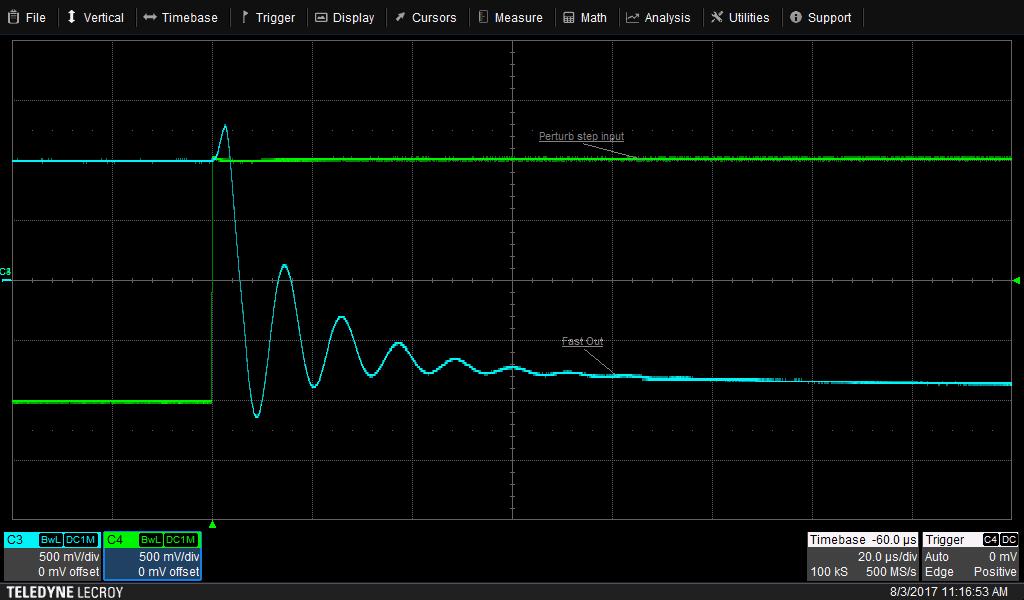 7. Tuned for some overshoot (if overshoot is acceptable) and ringing with improved settling.
7. Tuned for some overshoot (if overshoot is acceptable) and ringing with improved settling.
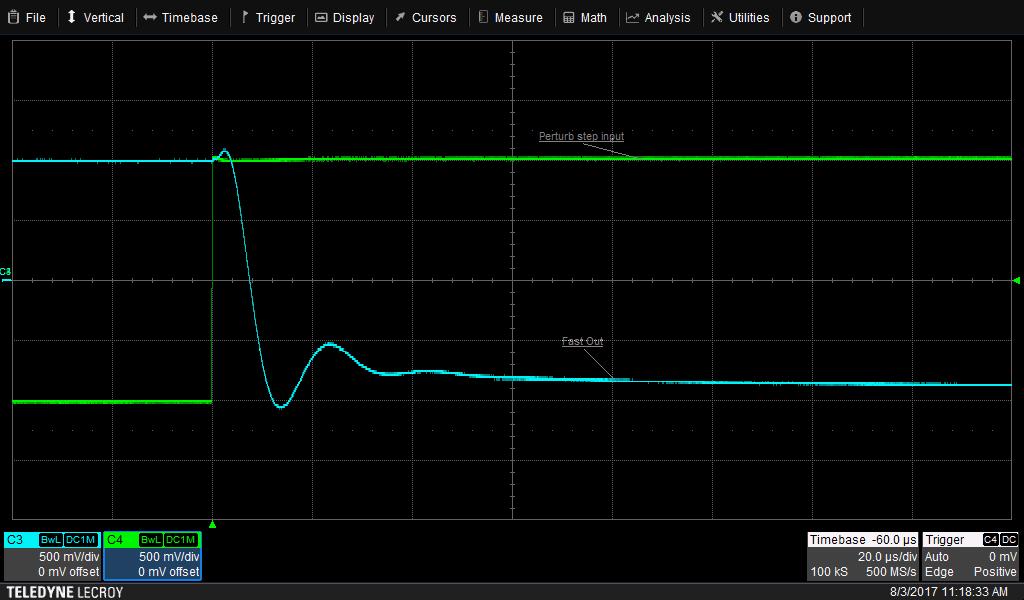 8. Reducing bandwidth may help reduce ringing.
8. Reducing bandwidth may help reduce ringing.
Return to homepage
| Sorry, no more chance for asking direct questions, queries, broken links, problems, flak, slings, arrows, kudos, criticism, comments, brickbats, corrections or suggestions. |
|

|